



Torque motor
Torque motor is a special motor with soft mechanical characteristics and wide speed range. Output power with constant torque. It can be applied to the opening and closing of gates (valves) and the drag system with large resistance torque, as well as to the devices with frequent forward and reverse rotation or other machines with similar actions.
Products
Automated Component
Linear Motor Module
Contact Us
Product Description

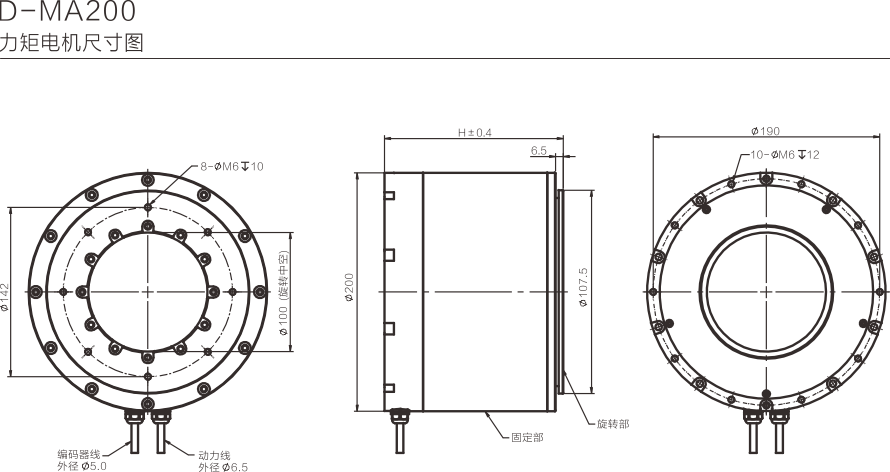
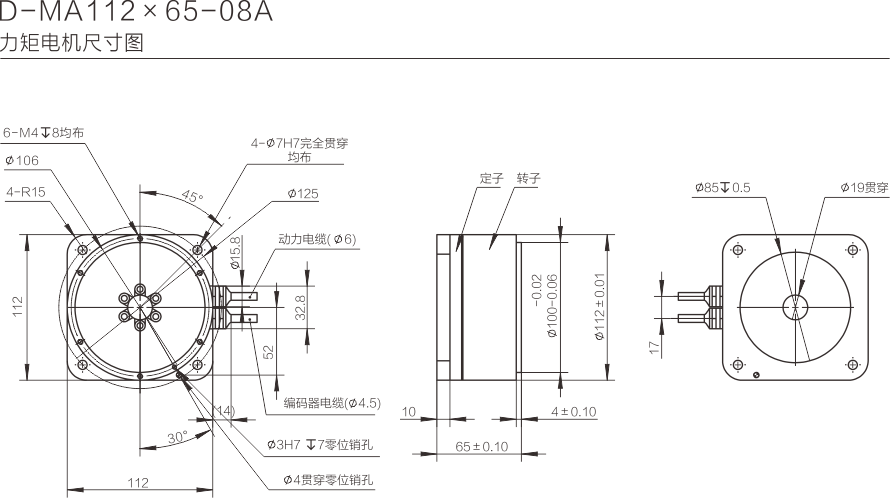
Overall dimensions
technical parameter
| 额定性能 | 符号 | 单位 | D-MA200X115-26A | D-MA200X115-26A | D-MA200X115-26A | D-MA200X115-26A | ||
|---|---|---|---|---|---|---|---|---|
| 峰值转矩(1s) | Tp | N.m | 26.0 | 47.0 | 75.0 | 100.0 | ||
| 连续转矩 | Tc | N.m | 11.2 | 18.9 | 28.6 | 37.5 | ||
| 电机常数 | Km | Nm/√W | 1.2 | 1.7 | 2.3 | 2.8 | ||
| 电气规格 | ||||||||
| 峰值电流 | Ip | Arms | 8.0 | 8.0 | 8.0 | 8.0 | ||
| 连续电流 | Ic | Arms | 2.8 | 2.7 | 2.6 | 2.5 | ||
| 电阻 | Rm | Ohms L-L | 6.3 | 9.0 | 12.5 | 16.1 | ||
| 电感 | L | Mh L-L | 25 | 44 | 69 | 90 | ||
| 转矩常数 | Kt | N.m/Arms | 4.0 | 7.0 | 11.0 | 15.0 | ||
| 反电势常数 | k | Vms/rad/s L-L | 2.3 | 4.0 | 6.4 | 8.7 | ||
| 极数 | 2p | 30 | 30 | 30 | 30 | |||
| 最高转速 | n | rpm | 200 | 200 | 200 | 200 | ||
| 机械规格 | ||||||||
| 转动惯量 | J | kg.m2 | 0.0145 | 0.0159 | 0.0176 | 0.0194 | ||
| 最大轴向负载 | Fa | N | 6500 | 6500 | 6500 | 6500 | ||
| 最大径向负载 | Ft | N | 3500 | 3500 | 3500 | 1300 | ||
| 轴向偏摆 | um | 40,20 or less | 40,20 or less | 40,20 or less | 40,20 or less | |||
| 径向偏摆 | um | 10.0 | 12.0 | 14.5 | 17.0 | |||
| 电机重量 | Mm | kg | ||||||
| 精度指标 | ||||||||
| 绝对精度 | Arc sec | ±35 | ±35 | ±35 | ±35 | |||
| 重复精度 | Arc sec | ±2 | ±2 | ±2 | ±2 | |||
| 说明 | 电机型号 | 电机高度 | ||||||
| 绝缘等级:F类 | D-MA200X115-26A | 115.00 | ||||||
| 耐压:1700VAC/1分钟 | D-MA200X130-47A | 130.00 | ||||||
| 绝缘:>10Mohms/500VDC | D-MA200X150-75A | 150.00 | ||||||
| 编码器:22位绝对值 | D-MA2000X170-100A | 170.00 | ||||||
Overall dimensions
technical parameter
| Rated performance | Symbol | Company | D-MA200X115-26A | D-MA200X115-26A | D-MA200X115-26A | D-MA200X115-26A | ||
|---|---|---|---|---|---|---|---|---|
| Peak torque (1s) | Tp | N.m | 14.0 | 24.0 | 37.0 | 50.0 | ||
| Continuous torque | Tc | N.m | 5.1 | 8.6 | 13.0 | 17.0 | ||
| Motor constant | Km | Nm/√W | 0.7 | 1.0 | 1.3 | 1.5 | ||
| Electrical specifications | ||||||||
| peak current | Ip | Arms | 17 | 29 | 45 | 59 | ||
| Continuous current | Ic | Arms | 1.8 | 3.2 | 5.0 | 6.8 | ||
| resistance | Rm | Ohms L-L | 1.0 | 1.8 | 2.9 | 3.9 | ||
| inductance | L | Mh L-L | 20 | 20 | 20 | 20 | ||
| Torque constant | Kt | N.m/Arms | 300 | 300 | 300 | 300 | ||
| EMF constant | k | Vms/rad/s L-L | 1.0 | 1.8 | 2.9 | 3.9 | ||
| Number of poles | 2p | 20 | 20 | 20 | 20 | |||
| Maximum speed | n | rpm | 300 | 300 | 300 | 300 | ||
| Mechanical specifications | ||||||||
| Moment of inertia | J | kg.m2 | 0.0023 | 0.0026 | 0.0031 | 0.0035 | ||
| Maximum axial load | Fa | N | 3000 | 3000 | 3000 | 3000 | ||
| Maximum radial load | Ft | N | 1300 | 1300 | 1300 | 1300 | ||
| Axial deflection | um | 40,20 or less | 40,20 or less | 40,20 or less | 40,20 or less | |||
| Radial yaw | um | 40,20 or less | 40,20 or less | 40,20 or less | 40,20 or less | |||
| Motor weight | Mm | kg | 5.2 | 6.4 | 7.8 | 9.6 | ||
| Precision index | ||||||||
| Absolute accuracy | Arc sec | ±45 | ±45 | ±45 | ±45 | |||
| Repetition accuracy | Arc sec | ±3 | ±3 | ±3 | ±3 | |||
| explain | Motor model | Motor model | ||||||
| Insulation class: Class F | D-MA150X100-14A | 100.00 | ||||||
| Withstand voltage: 1700VAC/1min | D-MA150X115-14A | 115.00 | ||||||
| Insulation: > 10Mohms/500VDC | D-MA150X135-14A | 135.00 | ||||||
| Encoder: 21 bit absolute value | D-MA150X155-14A | 155.00 | ||||||
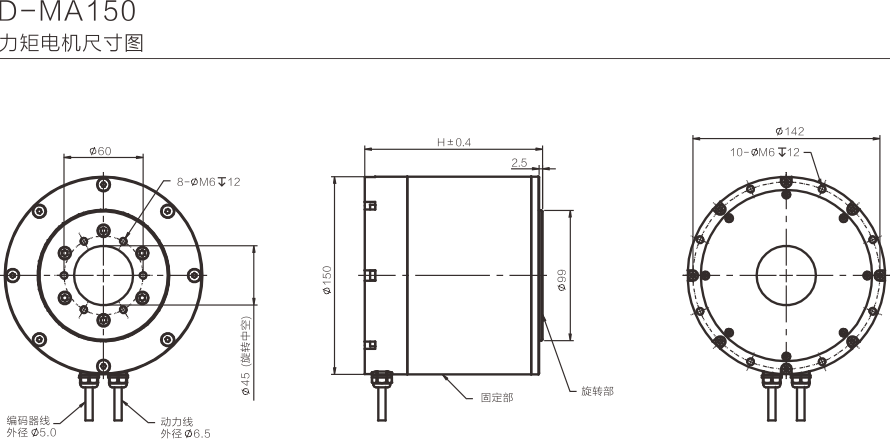
Overall dimensions
technical parameter
| form name | company | D-MA112X65-08A | |||
|---|---|---|---|---|---|
| Instantaneous maximum output torque |
N.m
|
10
|
|||
| Continuous maximum torque | N.m |
4
|
|||
| Maximum speed | rps |
4
|
|||
| Rated speed | rps | 2 | |||
| resistance | Ω |
8.9
|
|||
| inductance | mH | 21 | |||
| Moment constant | N/Arms | 3.4 | |||
| Back potential constant | V/ms-1 |
290
|
|||
| Continuous current | Arms |
1.5
|
|||
| peak current | Arms |
4
|
|||
| Polar logarithm | - | 10 | |||
| Accuracy requirements |
Encoder resolution |
pulse/rev | 1536000 | ||
| Absolute accuracy | arc-sec | ±26 | |||
| Repetitive positioning accuracy | arc-sec | ±1.2 | |||
Number of origin pulses |
pulse/rev | 1 | |||
| maximum power | KVA | 0.35 | |||
| Rated power | KVA | 0.1 | |||
| rotor inertia | kg·cm² | 80 | |||
| Allowable load Axial load (positive+) | N | 2000 | |||
| N | 1200 | ||||
| Allowable load Radial load (positive -) | Nm | 60 | |||
| Mechanical accuracy of load mounting surface | um | 15 , 5 or less | |||
| weight | kg | 5.8(3.6) | |||
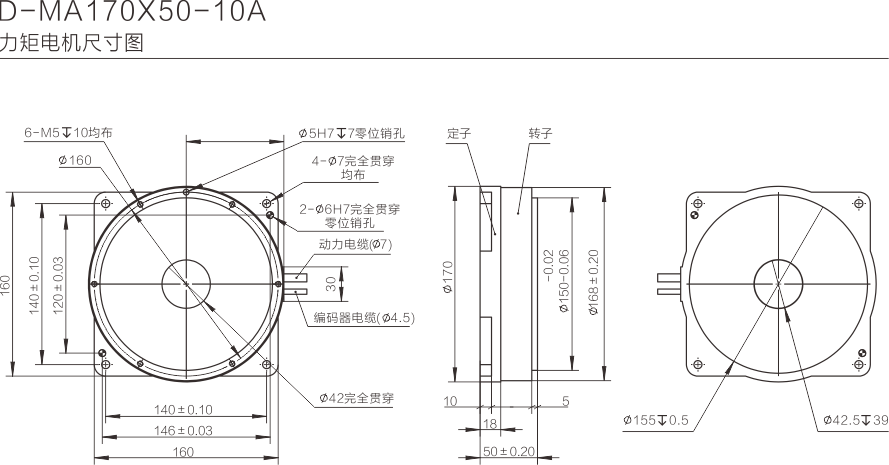
Overall dimensions
technical parameter
| form name | 单位 | D-MA112X65-08A | |||
|---|---|---|---|---|---|
| Instantaneous maximum output torque |
N.m
|
8
|
|||
| Continuous maximum torque | N.m |
3
|
|||
| Maximum speed | rps |
4
|
|||
| Rated speed | rps | 2 | |||
| resistance | Ω |
4.7
|
|||
| inductance | mH | 4.7 | |||
| Moment constant | N/Arms | 2 | |||
| Back potential constant | V/ms-1 |
166
|
|||
| Continuous current | Arms |
1.5
|
|||
| peak current | Arms |
5
|
|||
| Polar logarithm | - | 10 | |||
| Accuracy requirements | Encoder resolution | pulse/rev | 1048576 | ||
| Absolute accuracy | arc-sec | ±26 | |||
| Repetitive positioning accuracy | arc-sec | ±1.2 | |||
Number of origin pulses |
pulse/rev | 1 | |||
| maximum power | KVA | 0.3 | |||
| Rated power | KVA | 0.1 | |||
| rotor inertia | kg·cm² | 40 | |||
| Allowable load Axial load (positive+) | N | 1000 | |||
| N | 600 | ||||
| Allowable load Radial load (positive -) | Nm | 30 | |||
| Mechanical accuracy of load mounting surface | um | 25,15or less | |||
| weight | kg | 2.8 | |||
Related products


Scan to learn more about us
Shenzhen Headquarters: B10/F, Block BC, Huizhi R&D Center, Xixiang Street, Bao'an District, Shenzhen City, Guangdong Province, China..
Huizhou Base: 201 Yueming Road, Sanhe Village, Tonghu Town, Zhongkai High tech Zone, Huizhou City, Guangdong Province, China.
Copyright ◎ Shenzhen Shenkeda Intelligent Equipment Co., Ltd 粤ICP备12028729号